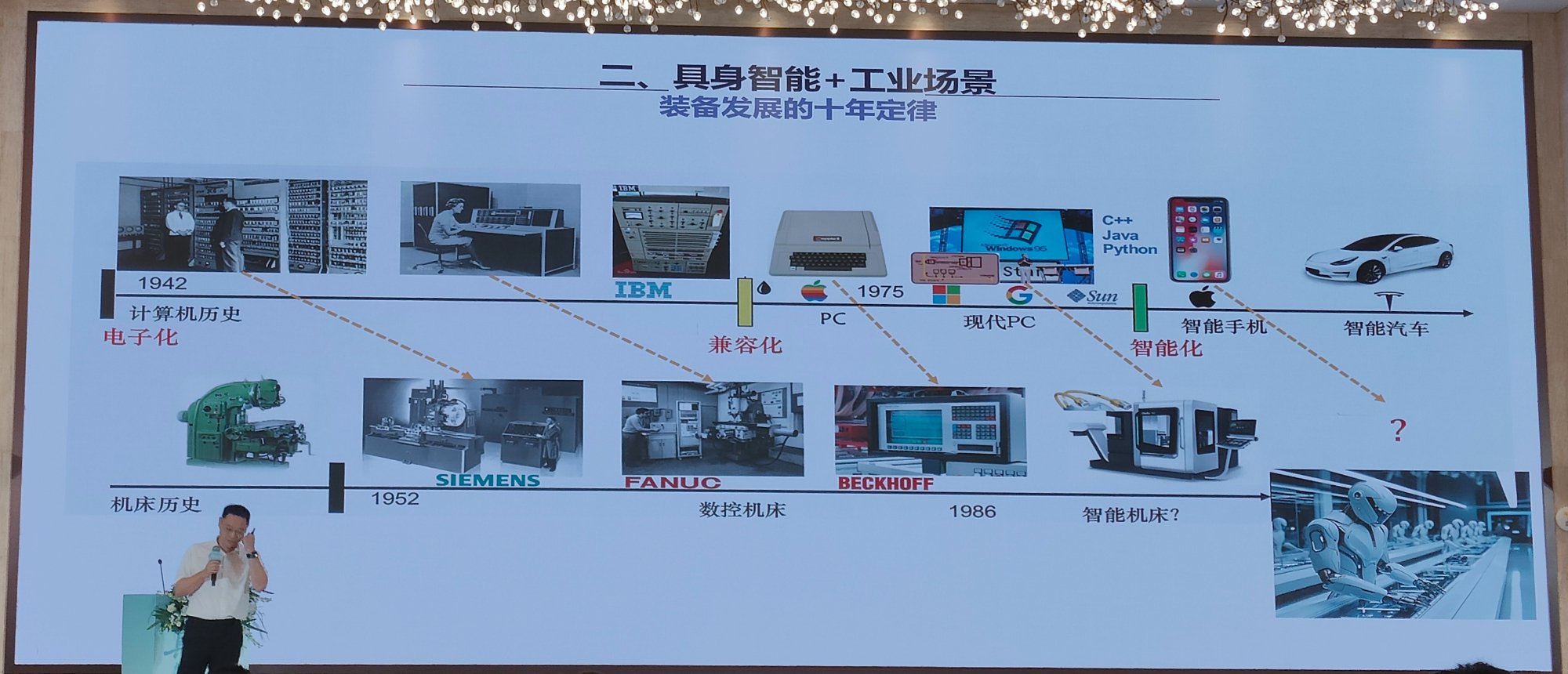
简单的AI没有投资,其价值取决于其在场景中的整合。随着Openai和DeepSeek等大型模型的流行,人工智能时代就会到来。接下来的一个问题是:虚拟AI的智能何时重现为体现的智能,尤其是人形机器人?在5月25日下午在杭州举行的公司行业和资本匹配会议上列出的“绣花情报,聪明的未来”行业中,中国工程学院的学者谭江说:人类机器人目前有两个最大的缺点:其中一个有两个最大的赤字:其中两个是最大的短途短暂的短途短暂的短途短暂的短途频率:有两个频繁的频繁;其余的是他们的小腿和大腿的协调不佳,人们必须用绳索奔跑以避免掉落。东瓜新一代人工智能行业技术研究所的总监Xu ChenTE还说,从长远来看,芯片和能源是开发人形机器人的最关键问题,从长远来看,计算能力和能量分配的竞争很重要。据报道,该论坛是由Dongguan Binhai湾新地区管理委员会和Zhejiang Zhejiang Silver Huijin Asset Co.会议还举行了Zhejiang Silver Huijin“ AI+Robot”合作伙伴在战略生态合作方面的合作伙伴和Dongguan Binhai湾新地区管理委员会的人工智能行业基金的签署仪式。那么,体现的情报还离我们有多远?未来会在哪里发展? ORAS尚未完全实施人形机器人。实际上,早在1973年,日本的瓦多达大学的加托·伊希罗(Kato Ichiro Kato),dWabot-1的人形智能机器人的第一个全尺寸。但是直到今天,人形机器人似乎从未赚钱。 Xu Chen认为,机器人不必像人一样拥有两英尺而走路。 “两英尺增加了自由,但也增加了成本。如果没有实际应用,自由的增加就没有意义。”在Xu Chen的角度来看,已经有一些工业机器人可以替换人类机器人,这是AI火之前使用的固定杀戮机器人和自动化设备。如果他想在工厂释放人员,那么当前的机器人是“愚蠢的”。经过一亿级的电子公司审查后,他发现灵活性并不是一个机器人臂的灵活性,但成本高出几倍。技术与行业错位之间的矛盾反映了参与者。如果人类机器人想实现完整的工业化,他们仍然需要继续努力。陈·舒隆(Chen Shulung),Fulai新材料的首席科学家指出,触觉理解是体现情报的主要缺点。 70%的人类环境信息是通过视觉获得的,但是诸如癫痫发作和操作之类的良好运动依赖于触觉反馈。当前,大多数机器人仅配备了基本力传感器,这些传感器很难模仿人手指的触觉灵敏度。在他展示的实验中,配备了柔性电子皮肤的机器人可以制造出诸如针线之类的准确性任务,但成本是传统解决方案的五倍,并且“大规模生产和成本降低仍然很困难”。东圭科学与技术创新融资集团副总经理刘海(Liu Hui)也认为,体现情报的爆炸必须越过“三个差距”:一个是技术成熟度和成本控制之间的平衡;第二个是应用程序方案的比例验证;第三是工业链流动变化的合作。根据情况,目前很难在AI中实施的主要类人机器人。这是否意味着不确定体现智能的未来吗?谭江说,当我们无法分辨虚拟人,罗布索特和真实人之间的区别时,我们认为人工智能技术的水平很高。 “这个王国离我们不远,其中一部分已经实现。” Liu Hui使用了相似的新能量车辆发展的历史:“从实验室原型到商业实施,至少需要10年的时间,并且资本将不得不容忍长期的周期和高风险。” Hangzhou Bohai Huijin董事长Shao Kangying认为,感知是链接“数据决策执行”的主要链接,并且将与未来的AI模型深入联系。 Xu Chen使用“十年的设备开发法”来解释具体情报的前景e。 Xu Chen说,第一代计算机于1942年推出,十年后,西门子在自动化的庞克 - 苏斯特里推出了第一代设备。计算机继续开发,CNC机床出现; PC机器于1975年出现,机床设备开始朝着数字化发展。既然智能手机已闻名,则预计机床将在智能方向上进行更新。但是,对于工厂而言,设备更新的方向可能不是“完全自动化”,而是“灵活的适应性”。 Xu Chen预测,将来更新现有商业设备的成本约为3万亿元。那么我应该如何适应呢? Xu Chen教导说,简单的AI没有投资,其价值取决于其在场景中的整合。 “例如,大小和模型的好处可用于实施合作。大型模型在一般的知识和理解中是很棒的,但是专业的PA行业领域中的拉列特和处理标准需要准确适应小型模型。因此,大型模型可以负责全球决策,而小型模型则致力于优化单点,从而降低算法的扩展成本。 “

